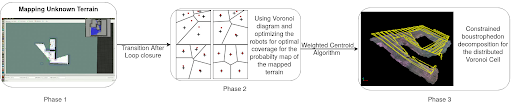
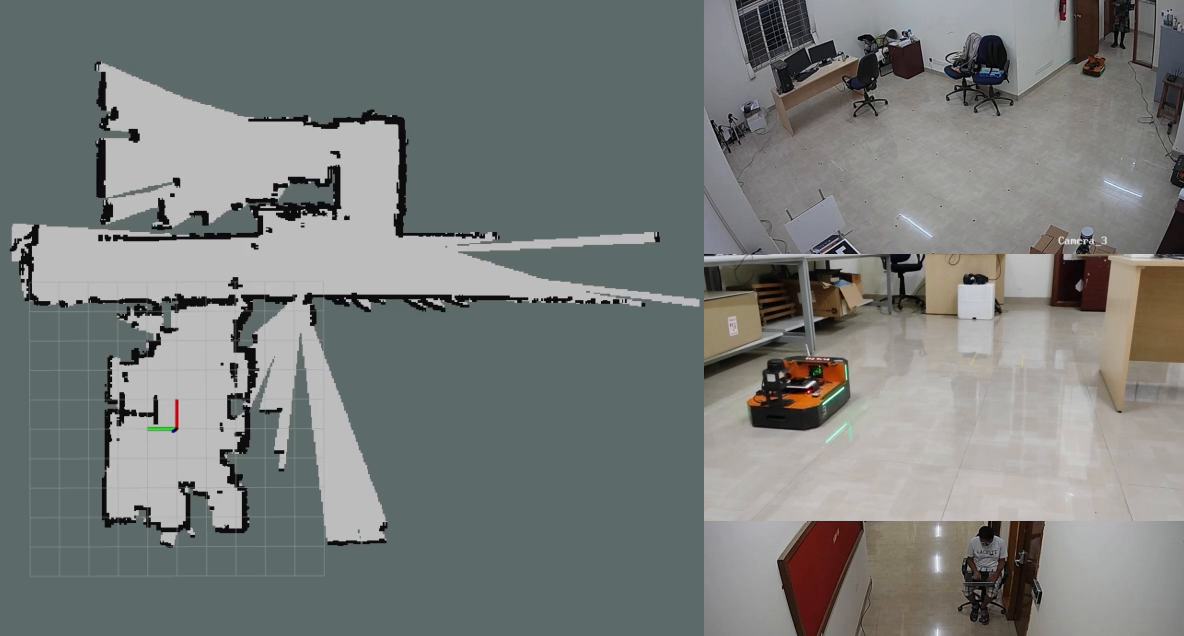
Multi-Agent Warehouse Coverage & Cleaning
Efficient coverage and cleaning of unknown terrains using multiple ground robots.
I am a PhD student at Stanford University in the Department of Aeronautics and Astronautics Engineering. I feel grateful to be advised by Prof. Somil Bansal in the SIA Lab. Prior to this, I spent four amazing years at IIT (BHU) Varanasi pursuing B.Tech. in Electronics Engineering. Check my recent research here.
My research focuses on learning from deployment-time data to uncover failure patterns in robotic systems for continuous improvement. I aim to: (a) bake safety mechanisms into their design (b) ensure reliable & efficient operation at runtime through lightweight guardrails.

Unsupervised Discovery of Failure Taxonomies from Deployment Logs
Aryaman Gupta*, Yusuf Umut Ciftci*, Somil Bansal
arXiv, 2026
[PDF]
[Website]
[Video]
[Code]
Detecting and Mitigating System-Level Anomalies of Vision-Based Controllers
Aryaman Gupta*, Kaustav Chakraborty*, Somil Bansal
IEEE International Conference on Robotics and Automation (ICRA), 2024
[PDF]
[Website]
[Video]
[Code]
Enhancing Safety and Robustness of Vision-Based Controllers via Reachability Analysis
Kaustav Chakraborty, Aryaman Gupta, Somil Bansal
arXiv, 2024
[PDF]
[Website]
[Video]
Deep Reinforcement Learning for Sim-to-Real Policy Transfer of VTOL-UAVs Offshore Docking Operations
Ali Mohamed Ali, Aryaman Gupta, Hashim A. Hashim
Applied Soft Computing Journal
[PDF]
[Website]
[Code]
Node Fault Prediction Assisted Small-World IoT Networks Using ML Frameworks: Towards Performance Improvement
Neha Sharma, Aryaman Gupta, Sivala Deepak, Om Jee Pandey [Best Paper Award]
IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), 2024
[PDF]
[Website]
[Code]
Doctor of Philosophy (Ph.D.) | Aeronautics and Astronautics | January 2025 - Present
Working with Prof. Somil Bansal at SIA Lab on failure-guided closed-loop learning, lightweight runtime guardrails, and safety alignment of large generalist policies.
Bachelor of Technology (B.Tech.) | Electronics Engineering | November 2020 - May 2024
Completed bachelor thesis under Prof. Om Jee Pandey on efficient data routing in optimal small-world wireless sensor networks using deep-RL.
Research Intern | Prof. Somil Bansal | May 2023 - August 2024
Worked on mitigating system-level failures of vision-based controllers in aircraft taxiing and ground robot navigation using reachability analysis.
Research Intern | Dr. Hashim Mohamed | Jan 2023 - Dec 2023
Worked on developing a deep-RL based docking mechanism for VTOL UAVs on offshore platforms.
Research Intern | Dr. Bharadwaj Amrutur | May 2022 - July 2022
Worked on multi-agent exploration using RRT-based methods and dynamic obstacle avoidance using 3D object detection.
Research Intern | Dr. Oh-Seol Kwon | Mar 2022 - July 2022
Worked on combining Faster R-CNN and Edge Enhanced SRGAN architectures for enhanced object detection in low resolution aerial images.
Efficient coverage and cleaning of unknown terrains using multiple ground robots.
RRT-Exploration and visual obstacle detection and avoidance package.
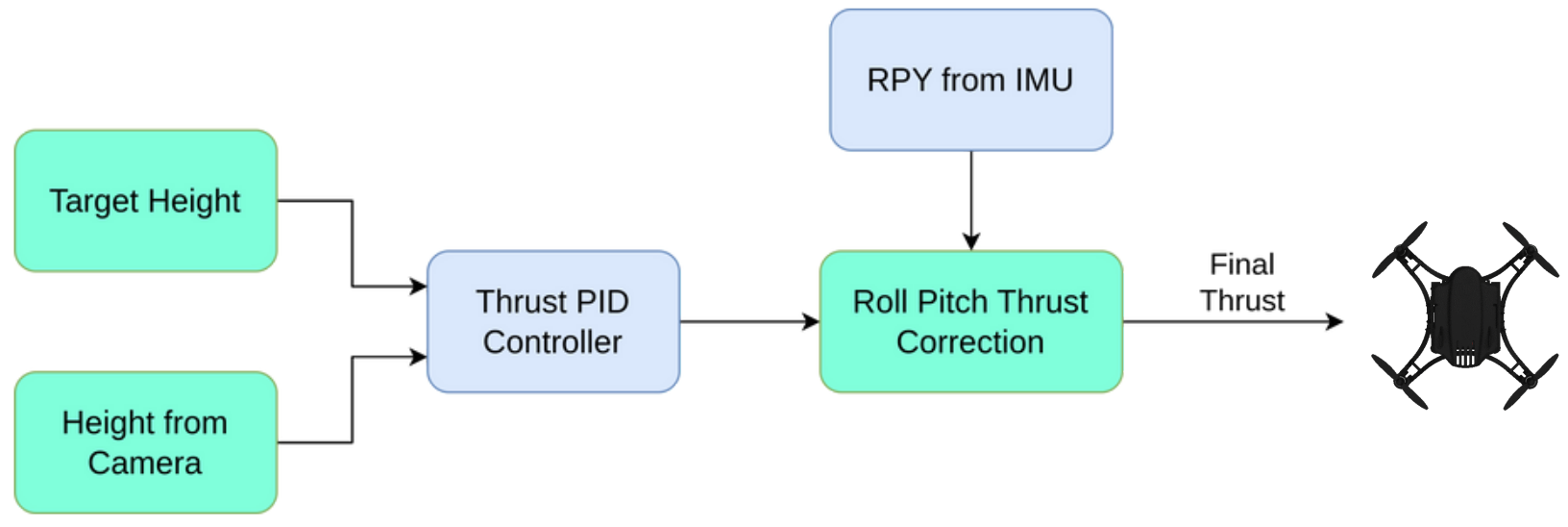
Cascaded PID-based control and swarm motion of drones.
Fabricated a ground robot to perform household chores and child care.
Enhanced network performance by introducing small-world phenomenon using actor-critic reinforcement learning.
UAV aided mapping and localization for a UGV to autonomously traverse in mountainous terrains.