Multi-Agent Coverage and Cleaning
The main objective of this project was to make an efficient multi-agent algorithm for cleaning an unknown terrain,
for which we built “Vox-Bot,” a ROS package for a multi-robot platform.
This is our solution submitted for AIITRA Robotics Challenge 2021, where we secured second position among all other IITs
and prestigious colleges of India.
Description
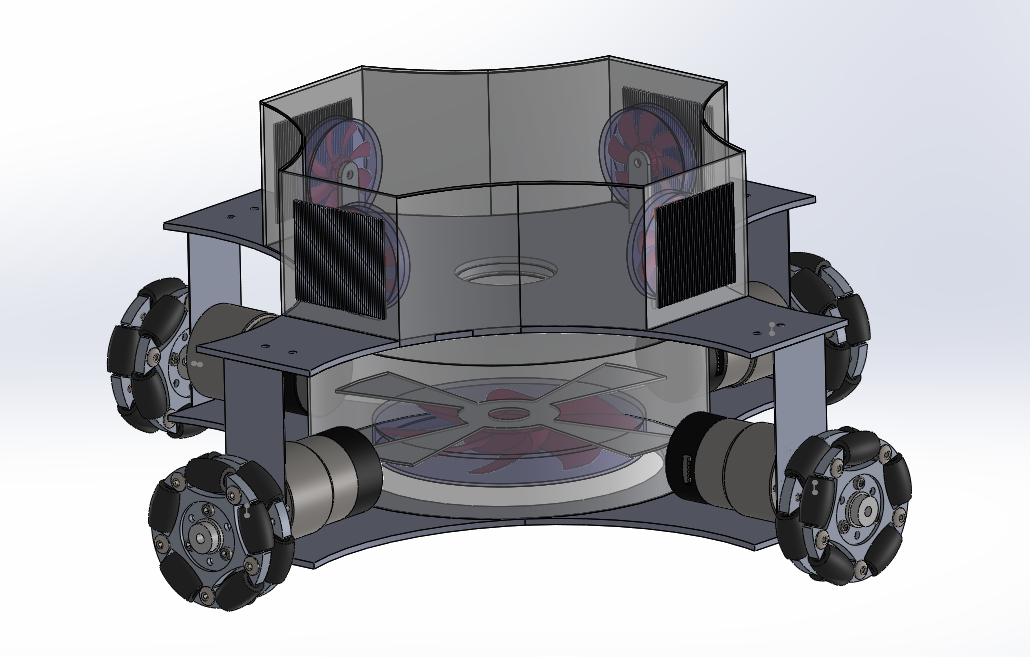 Vox-Bot CAD Design
Vox-Bot CAD Design
Vox Bot is a four-wheeled robot with omni wheels for maximum agility and mobility. The primary purpose of the robot is to perform vacuum cleaning autonomously in unknown terrain. It houses a Lidar for mapping and an SBC for all computational needs, with one high-power brushless motor for vacuum generation and four brushed motors for exhausts. For the Vacuum system, we have done multiple studies on the airflow, which can be found in the Airflow section. Below, we explain our solution for the problem statement.
Pipeline
We have modified the Vanilla navigation stack offered in move base ROS. We have used movebase flex for implementing the architecture of the below navigation stack.
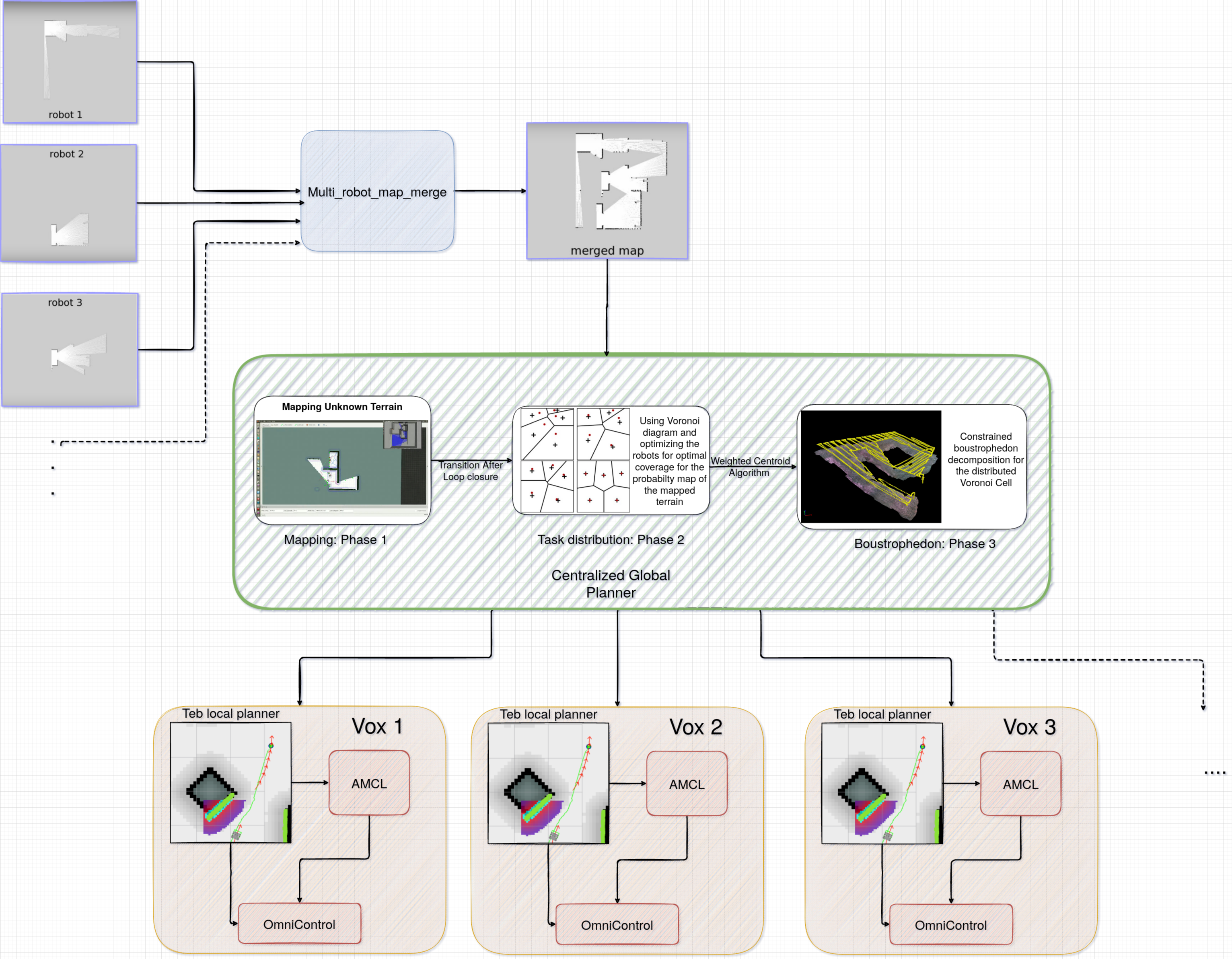 Complete Pipeline of our Solution
Complete Pipeline of our Solution
Below are a brief result that is not present in the proposal
Mapping
We have used RRT exploration instead of standard frontier exploration for making it more efficient.
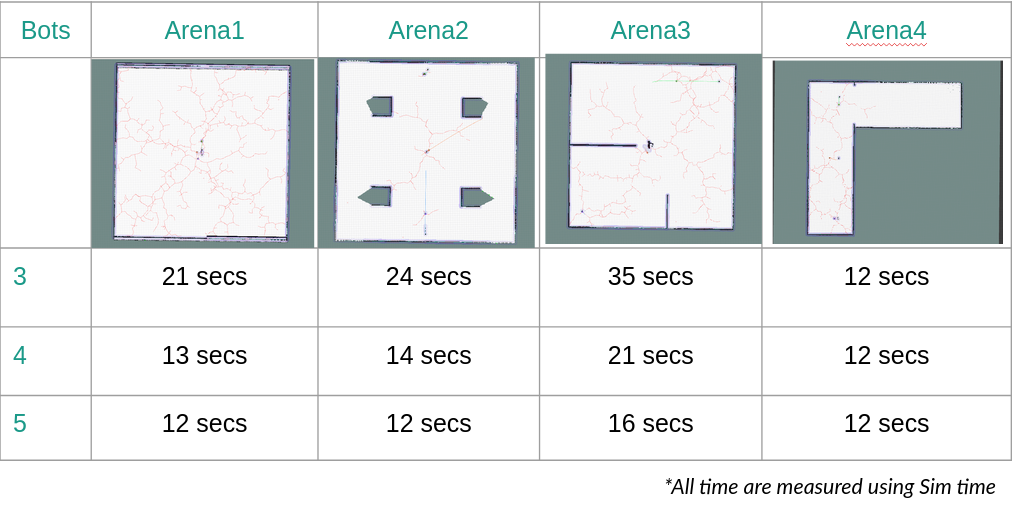 Comparision of Exploration Times with Different Number of Bots
Comparision of Exploration Times with Different Number of Bots
Optimal Coverage
We have used Voronoi diagrams and Weighted Centroid Algorithm for distributing the task between individual robots. More details about the same can be found in the proposal.
 Generating Voronoi Diagrams using Fortnes Algorithm
Generating Voronoi Diagrams using Fortnes Algorithm
 Robots Computing Path and Optimal Voronoi Cell
Robots Computing Path and Optimal Voronoi Cell
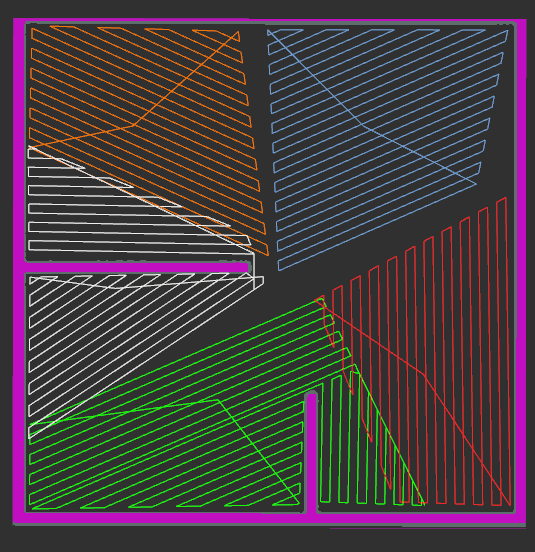
Boustrophedon Path
 Path Distribution for Arena 1
Path Distribution for Arena 1
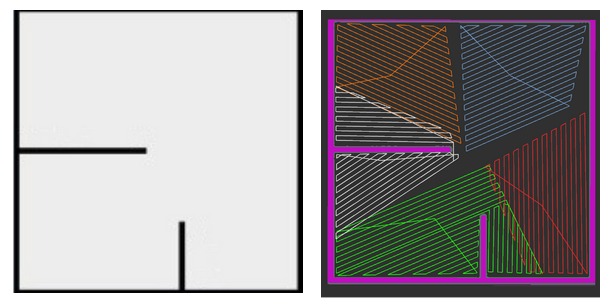 Path Distribution for Arena 2
Path Distribution for Arena 2
Generating boustrophedon paths for the polygon given by the Voronoi diagram the robot resides in.
Airflow Study
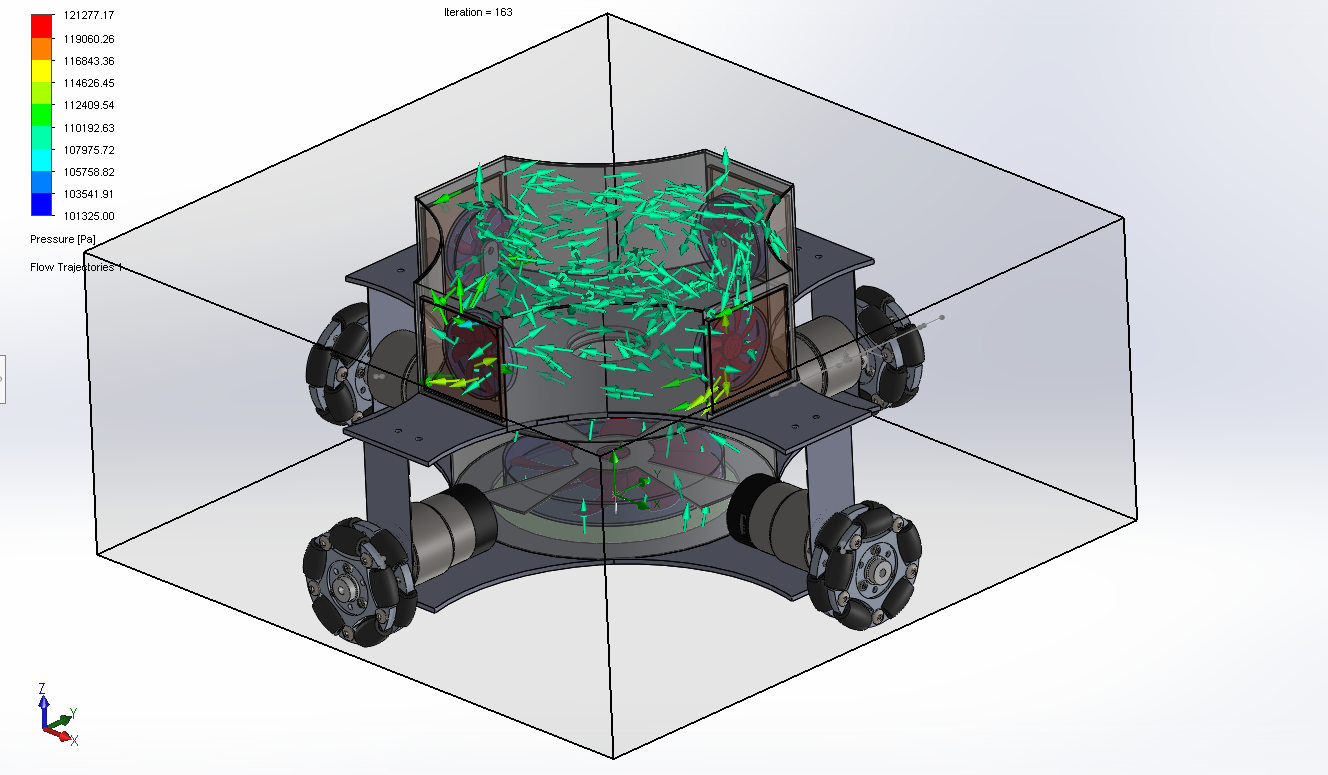
The vacuum of the bot works on the principle of the lower fan creating pressure difference to suck in air while the exhaust pushes out the air from the above compartment for efficient vacuum generation. The fan has been placed low for efficient cleaning, with a ground clearance measuring approximately less than half the wheel radius.
Analysis of the vacuum mechanism was done using the SolidWorks Flow Simulation tool to get outputs about the kind of behavior shown by our vacuum during actual implementation.
The simulation required us to cover our rotating regions with circular bounded bodies to define the rotation boundary. We also defined the inlet and outlet velocities as 0.6m/s and 0.15m/s below the bot and at the exhausts, respectively. As the simulation was an internal one, the image only shows the flow inside our bot, but the fact is quite evident through the trajectory of the arrows that in real-world scenarios, the vox would undoubtedly be an efficient vacuum design.
 Hypothetical System of Robot with Full Suction Power
Hypothetical System of Robot with Full Suction Power
 Airflow Inside Central Chamber
Airflow Inside Central Chamber